On September 9, Tencent RoboticsX Robotics Lab announced the latest research progress of its wheeled-legged robot Ollie, showing the first exposure of "haptic interaction" and "two-wheeled striding", further enriching the robot's The first "haptic interaction" and "two-wheeled stepping" were revealed, further enriching the robot's "senses" and improving its motion control capabilities.
Ollie is a wheeled and legged robot developed by Tencent. It integrates a number of leading mobile control technologies and makes key breakthroughs in the areas of motion planning, balance and stability, and human-robot interaction.
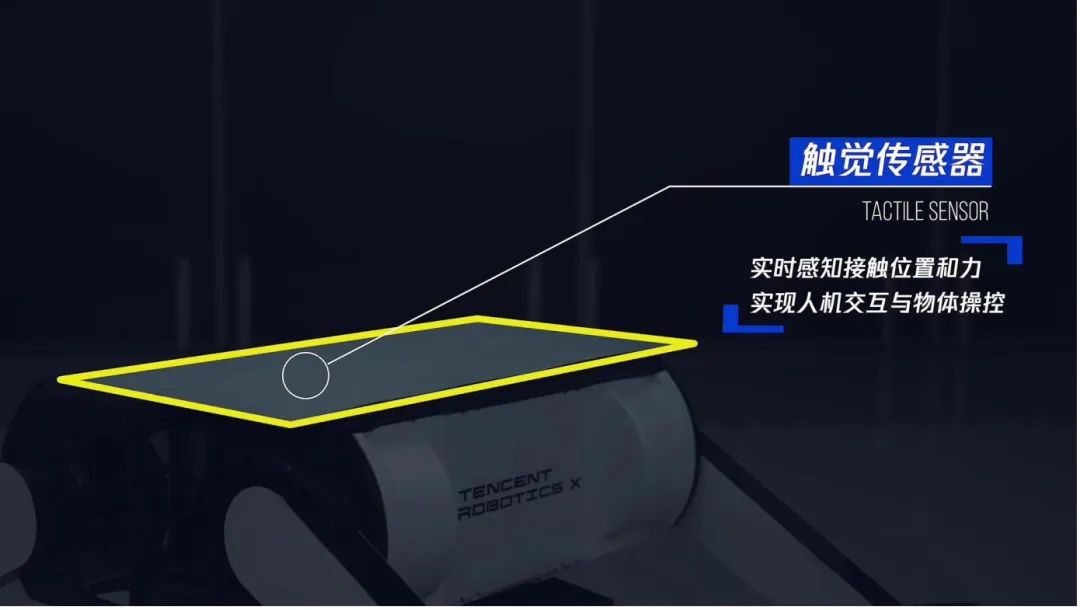
The new haptic sensors in this upgrade allow Ollie to respond to touch movements and challenge difficult tasks such as balancing spherical objects on its head.
Perception and cognitive technologies are the foundation for safe, efficient, and autonomous robot operation. How to equip robots with tactile capabilities close to human level in scenarios such as human-robot interaction, motion control and dexterous operation has become one of the research hotspots and technical challenges in recent years.
The haptic sensor jointly developed by Tencent RoboticsX Lab and Tsinghua University uses a new piezoresistive material with ultra-high sensitivity, ultra-large range, ultra-fast response speed, and ultra-strong cyclic stability, combined with customized electrode adaptation module and high-speed signal acquisition module, and self-developed software and hardware integration solution to allow robots to sense extremely subtle pressure changes on the body surface. The related research results have been accepted by ACSNANO, a top international journal in the field of nanotechnology.
With the new haptic sensor, Ollie can use its own "skin" to feel the external contact information, including the perception and recognition of touch mode, touch strength, touch orientation, touch trajectory shape, and respond in different ways.
With the support of haptics, combined with stable motion, Ollie can also challenge the difficult task of head balancing and carrying spherical objects, using the contact information between the sphere and the robot surface, combined with its own posture sensors and joint motor encoder data, to achieve the combination of upper body object manipulation ability and lower body movement and balance ability.
The newest Ollie also demonstrates a two-wheeled stepping motion, adding the ability to step and move simultaneously for a longer duration, with smoother movements and more stable overall performance than the "step-in-place" motion demonstrated last year.
Our Authors
We have experienced employees who choose the services we provide, and our services are all professional. If you contact us, we may receive a commission.
Why You Can Trust ELECTREND
15
Years of service experience
580+
Brand Customer Choice
1000+
The choice of corporate customers